- $

防爆扒渣機廠家詳解關于忠良扒渣機的分類
來源:www.daxuedog.com 發布時間:2020/7/6 16:47:47
扒渣機概述
扒渣機(Mucking Loader),又名挖掘式裝載機,防爆扒渣機廠家分享刮板扒渣機是由機械手與輸送機相接合,扒渣和輸送裝車功能合二為一,采用電動全液壓控制系統和生產裝置,具有安全環保、能耗小、效率高的特點。
扒渣機是把熔池、鋼包或鐵水罐中金屬液面上的熔渣除去的設備。它是提高鐵水預處理和冶金效率的重要設備。
通常采用液壓或氣動傳動,快速往復運動為其主運動,輔之以傾動和水平回轉,即可滿足從容器中除渣的要求。有的機型還有升降運動。并可調節扒渣板以適應渣面的原始高度。
扒渣機按主運動方式可分為伸縮式和小車式兩種。
扒渣機分類
履帶式扒渣機:
由伸縮臂、傾動機構、回轉機構及底座組成。
伸縮臂的前端與扒渣板相連、支承在固定的滾輪上,由液壓馬達或氣馬達驅動鏈輪鏈條做往復扒渣運動。傾動機構由液壓缸或汽缸驅動,使伸縮臂繞鉸支點≤±15o上下傾動。
上述兩機構都裝在回轉機構上。回轉部分的轉角一般≤180o,且多為液壓缸驅動。
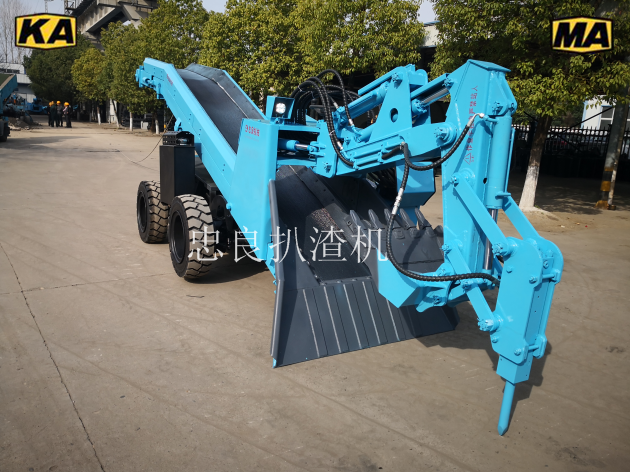 輪式扒渣機:
輪式扒渣機:
扒渣臂、傾動和回轉機構皆置于小車之上,由汽缸一鋼繩倍速機構拖動小車做往復扒渣運動,由汽缸推動平行四連桿機構使扒渣臂上下傾動,上述工作裝置由一立軸支承在小車上,并由雙汽缸一曲柄推動大臂繞立軸做水平回轉。
而升降機構為電機一蝸輪螺桿副,通過改變平行四連桿中的后連桿長度來調節扒渣板的原始高度。
扒渣機是礦山企業必不可少的采礦設備,替代人工作業,將爆破后的各種礦渣石料扒裝到運輸車輛上,是人工和其它機械的替代產品
扒渣機結構組成
扒渣機主要是由扒渣工作裝置(扒臂)、刮板輸送機組成。
其中扒臂是由水平擺動座、動臂、斗桿、四桿機構以及扒斗5個部分串聯而成,是扒渣機中關鍵的工作部件。其作業效率決定了扒渣機的整機工作性能。對扒臂進行動力學分析和建模是完成扒臂結構設計和實現扒臂運動控制所必需的。
扒臂是由多個轉動關節串聯而成。是由多個剛體組成的動力學系統.具有非線性以及多輸入、多輸出的特點。各個部件之間存在著復雜的耦合關系。
為了使扒臂完成預期的作業路徑。每個關節必須提供一定規律的驅動力矩。通過建立扒臂機械手的動力學模型.并對機械手動力學模型進行分析與評價。為得出合理的結構尺寸以及恰當的驅動油缸參數提供數據基礎。
扒渣機(Mucking Loader),又名挖掘式裝載機,防爆扒渣機廠家分享刮板扒渣機是由機械手與輸送機相接合,扒渣和輸送裝車功能合二為一,采用電動全液壓控制系統和生產裝置,具有安全環保、能耗小、效率高的特點。
扒渣機是把熔池、鋼包或鐵水罐中金屬液面上的熔渣除去的設備。它是提高鐵水預處理和冶金效率的重要設備。
通常采用液壓或氣動傳動,快速往復運動為其主運動,輔之以傾動和水平回轉,即可滿足從容器中除渣的要求。有的機型還有升降運動。并可調節扒渣板以適應渣面的原始高度。
扒渣機按主運動方式可分為伸縮式和小車式兩種。
扒渣機分類
履帶式扒渣機:
由伸縮臂、傾動機構、回轉機構及底座組成。
伸縮臂的前端與扒渣板相連、支承在固定的滾輪上,由液壓馬達或氣馬達驅動鏈輪鏈條做往復扒渣運動。傾動機構由液壓缸或汽缸驅動,使伸縮臂繞鉸支點≤±15o上下傾動。
上述兩機構都裝在回轉機構上。回轉部分的轉角一般≤180o,且多為液壓缸驅動。
扒渣臂、傾動和回轉機構皆置于小車之上,由汽缸一鋼繩倍速機構拖動小車做往復扒渣運動,由汽缸推動平行四連桿機構使扒渣臂上下傾動,上述工作裝置由一立軸支承在小車上,并由雙汽缸一曲柄推動大臂繞立軸做水平回轉。
而升降機構為電機一蝸輪螺桿副,通過改變平行四連桿中的后連桿長度來調節扒渣板的原始高度。
扒渣機是礦山企業必不可少的采礦設備,替代人工作業,將爆破后的各種礦渣石料扒裝到運輸車輛上,是人工和其它機械的替代產品
扒渣機結構組成
扒渣機主要是由扒渣工作裝置(扒臂)、刮板輸送機組成。
其中扒臂是由水平擺動座、動臂、斗桿、四桿機構以及扒斗5個部分串聯而成,是扒渣機中關鍵的工作部件。其作業效率決定了扒渣機的整機工作性能。對扒臂進行動力學分析和建模是完成扒臂結構設計和實現扒臂運動控制所必需的。
扒臂是由多個轉動關節串聯而成。是由多個剛體組成的動力學系統.具有非線性以及多輸入、多輸出的特點。各個部件之間存在著復雜的耦合關系。
為了使扒臂完成預期的作業路徑。每個關節必須提供一定規律的驅動力矩。通過建立扒臂機械手的動力學模型.并對機械手動力學模型進行分析與評價。為得出合理的結構尺寸以及恰當的驅動油缸參數提供數據基礎。
上一條:
忠良扒渣機性價比高質量好價格優
下一條:
【中亞】伊朗用戶到襄陽考察選擇忠良扒渣機合作